2.2 �������� ��һ
|
���� |
CJ �� |
CJ �� |
|
��������ת�� |
180�� |
180�� |
|
���������ת���Ƕ� |
90�� |
90�� |
|
�綯�����ʣ�kW�� |
0.36 |
0.72 |
|
����Ť�أ�N.m�� |
450 |
750 |
|
�֡���բ��Ȧ���Ƶ�ѹ(V) |
DC220��AC220 |
DC220��AC220 |
|
�����ѹ��V�� |
DC220��AC220 |
DC220��AC220 |
|
�綯���������A�� |
2.7 |
5.2 |
|
�֡���բʱ�䣨s�� |
2.4 |
3.4 |
|
����������kG�� |
|
|
|
���ײ�Ʒ���ο��� |
GN22-12/2000~4000
GN25-12/2000��3150
GN16-40.5/2000
GN27-40.5/2000��3150 |
GN30-12/2000~4000
GN22-12/5000~8000
GN27-40.5/4000 |
|
���ײ�Ʒ����ת�� |
GN22-12/2000~8000(������5000) 89��
GN22-12/5000 76��
GN25-12/2000��3150 83��
GN30-12/2000~4000 85��
GN16-40.5/2000 80��
GN27-40.5/2000~4000 80�� |
ע��1���������뿪�ص�ƥ�䣬��ͨ���������뿪�زٶ��ձ۵ijߴ���������
2���綯��������������ÿ���Ӳ��ó���4�Ρ�
3ʹ�û���
2.1 ���θ߶ȣ�������ĸ��뿪�أ�
2.2 �����¶ȣ�-40��~+40�棻
2.3 ���ʪ�ȣ�������ĸ��뿪�أ�
2.4 ��Ƶ�����ҵ���
2.5 ��ʴ��������������ҳ���������ը�ԡ���ʵ�����ʣ�
2.6 ��Դ��ѹ�仯��Χ�����ѹ��85%~110%��
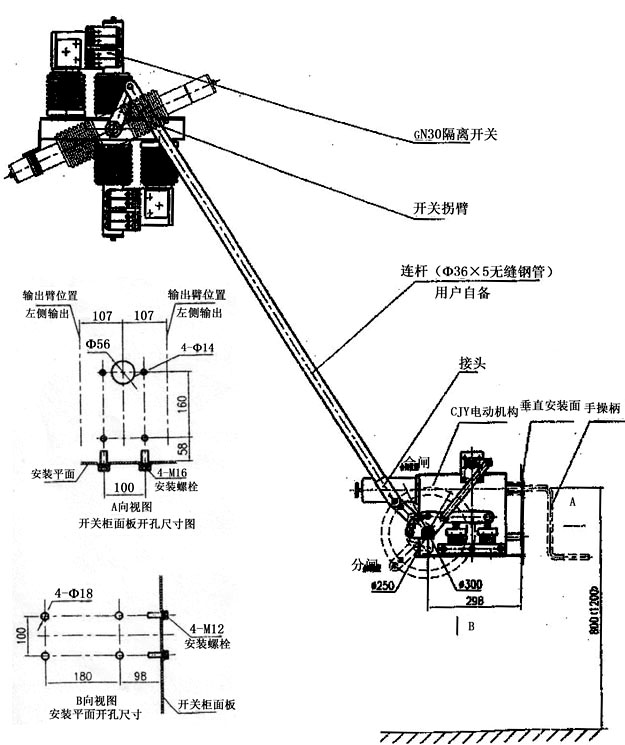
4 �ṹ�붯��ԭ��
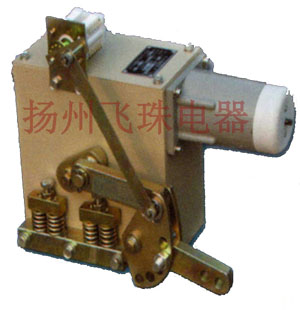
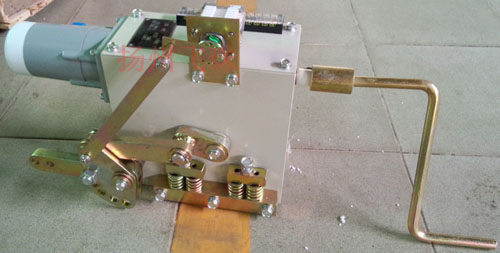
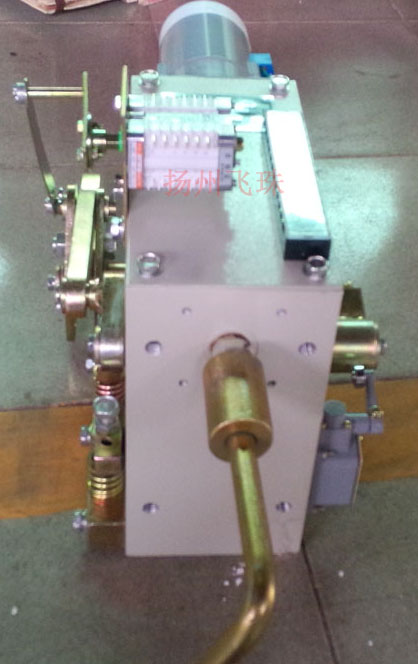
4.1��Ʒ�ṹ
����Ʒ�ɻ�е����ϵͳ����������ϵͳ��������������ɡ����μ��ڲ��ṹͼ��ͼһ��ͼ��������ԭ����������·ͼ��ͼ����ͼ�ġ�ͼ�塣
4.1.1��е����ϵͳ�ɵ綯�����������ϸ˼���װ�ã�����������������˻�����ͨ���ձ�������ࡣ�������з֡���բ�յ���λ���ؼ���е��λװ�á�����װ�ã�ʹ��������ձ۵�ת��������ȷλ�á��õ綯�����ձ������Ϊ90��.
4.1.2��������ϵͳ�ɰ�ť���Ӵ������۶������г̿��ء��������ء�ת�����ؼ�����������ɡ�ͨ�����Ƶ綯��������ת��ʵ�ֻ����ķ֡���բ����������ʵ�־͵ز�����Զ�̲����Լ�ʵ�����·�����豸�ĵ����������ź�ָʾ�ȡ�
4.2����ԭ��
4.2.1�綯��բ
���¡���բ����ť���Ӵ���FC��բ��Ȧͨ�磬�䳣����ͷ�պϣ����մ�ͷ�Ͽ����綯����·��ͨ���綯�����������ϸ˼���װ�ã�ͨ������������������˻�����ʹ����������ձ�����뿪������ձ�ͨ����������ʵ�ַ�բ�����������뿪�ؽӽ��յ�λ��ʱ��װ�����������ϵ���λ��ʹ�г̿���FXK���Ͽ�λ�ã��Ӵ���FC��բ��Ȧ�ϵ磬�䳣����ͷ�Ͽ������մ�ͷ�պϣ��綯���ϵ硣��ʱ�綯����Ȼ�����ϸ������ּ���װ�ü���֮���ӵ�����ձ�ת��������ѹ������װ���ϵ��ɿ�ʱ���綯����ȫֹͣ����ʱ���뿪�����ô��ڷ�բλ�á�
4.2.2�綯��բ
���¡���բ����ť���Ӵ���FC��բ��Ȧͨ�磬�䳣����ͷ�պϣ����մ�ͷ�Ͽ����綯����·��ͨ���綯�����������ϸ˼���װ�ã�ͨ������������������˻�����ʹ����������ձ�����뿪������ձ�ͨ����������ʵ�ַ�բ�����������뿪�ؽӽ��յ�λ��ʱ��װ�����������ϵ���λ��ʹ�г̿���HXK���Ͽ�λ�ã��Ӵ���HC��բ��Ȧ�ϵ磬�䳣����ͷ�Ͽ������մ�ͷ�պϣ��綯���ϵ硣������ձ�ѹ������װ���ϵ��ɿ�ʱ���綯����ȫֹͣ����ʱ���뿪�����ô��ں�բλ�ã�GN22\GN25���뿪���ں�բ����λ�ã���
4��2��3���ֹͣ
�ڷ֡���բ�����У���Ҫ��;ֹͣʱ���ɰ��¡�ֹͣ����ť���жϿ��Ƶ�Դ���Ӵ������綯����Դ�жϣ�ʹ����ֹͣת����
��.��.���ֶ������֡���բ
���ع����������һС�ף������иǡ�����Ҫ�ֶ�����ʱ�����ȴǡ�����綯��������·�������Ǵ�ʱ�����Ƶ�Դ���жϣ���װ���ɿ��ع�װ�裩����ʱ�����ֱ�ֱ�Ӳ����ϸ˽��з֡���բ��
4.2.5���ء�Զ�ز���
4.2.4.1���أ����ţ���ʱԶ�ز���������·���жϣ���װ���ɿ��ع�װ�裩����ת������ת������λ�ã���ֱ�ӽ��о͵ط֡���բ������
4.2.4.2Զ�أ���ת������ת��Զ��λ�ã����Ϲ��ţ�Զ�ز���������·����ͨ����ʱ��ֱ�ӽ���Զ�̷֡���բ������
5 ����Ӧ������ļ�
5��1����Ӧ
(a) �綯���� 1̨
(b) �ֱ� 1��
5.2����ļ�
(a)��Ʒ�ϸ�֤
(b)��װʹ��˵����
(c)��Ʒװ�䵥
6 ������֪
6.1�ٶ������ͺš�������ѹ��ʽ��������ֱ��������װ��ʽ��������
6.2������뿪���ͺŹ��������
6.3�ٶ�����������Ӧ��ɵ�����Ӧ��
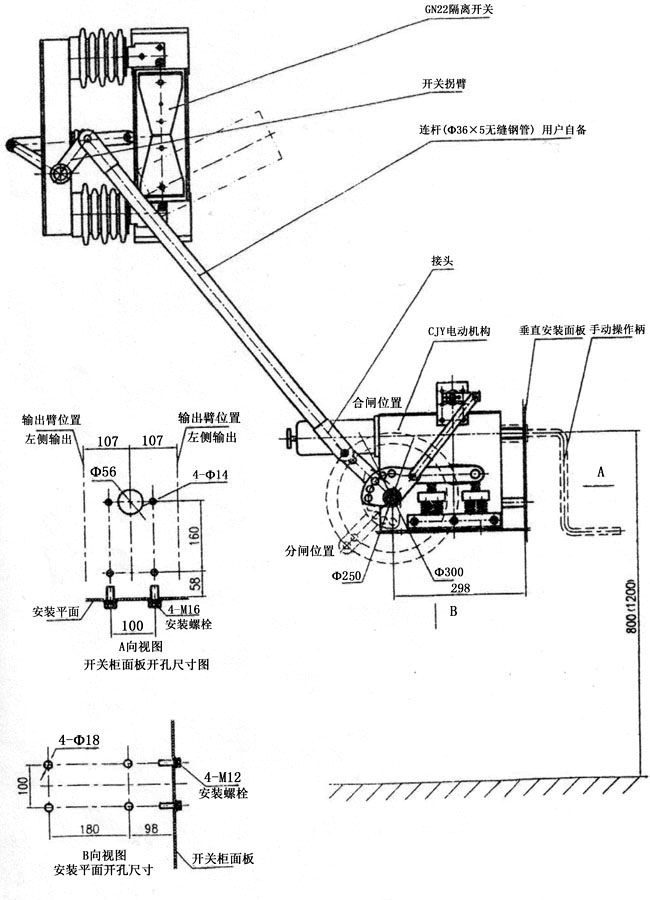
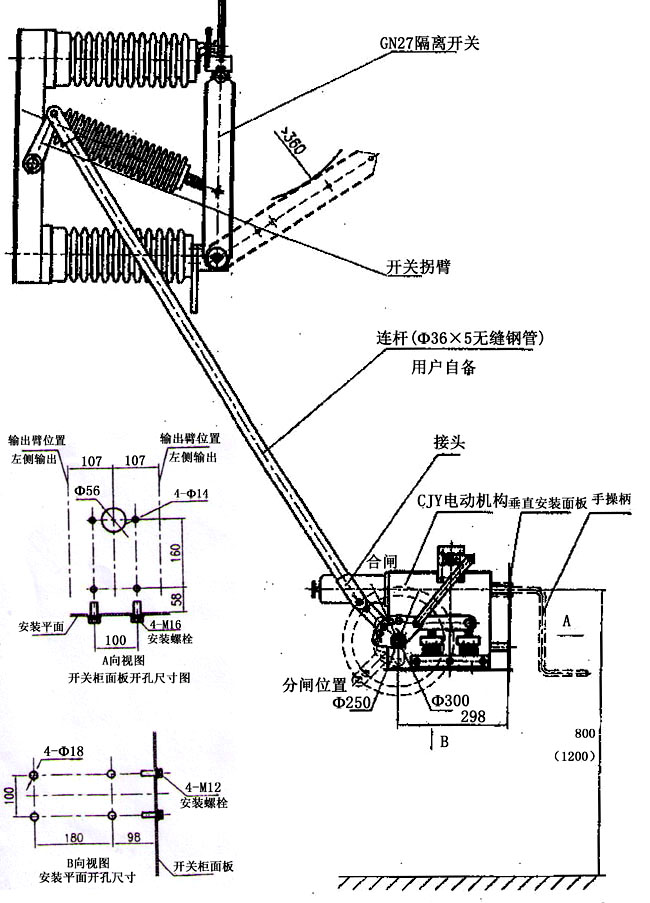
7 ��Ʒ���μ���װ�ߴ�ͼ���������ذ�װʾ��ͼ